 Nico Brailovsky's thought repository
Nico Brailovsky's thought repository
From the project's repo:
Homeboard is a project to display pictures and an arbitrary SVG overlay with information through a PoE picture frame (you can see above my creative attempt at hiding the ethernet cable run with some decorations).
- On startup, connects to wwwslider to retrieve images. The device is mostly stateless, no need to pre-provision pictures or config (just the software, until I make it bootable over LAN).
- Connects to an MQTT broker for remote-control. wwwslider provides a remote-control interface.
- Displays pictures, but only when you are around. It has a presence sensor so that the screen will turn off when no one is there to see the pictures (bonus: you can use this as an overcomplicated presence sensor for home automation over MQTT).
- Integrates with ZMW, my home automation project. ZMW can push an SVG overlay, which I am using to show the weather, announcements and a QR code for the remote control URL.
Houseboard P0: PP0
Published 2024-06-30
I have a ton of unnecessary home automation, but I'm lacking some kind of house board: a quick way of getting info before leaving (like weather, or transport conditions), leaving messages (don't forget to pick up kids from school) or just a shopping list. Sensible people would look at readily available digital signage solutions. Of course I didn't do that, instead decided to build my own.
I settled for a quick list of requirements to guide the project: Linux based, running off power-over-ethernet, with net-boot and 100% locally hosted. How hard can that be?
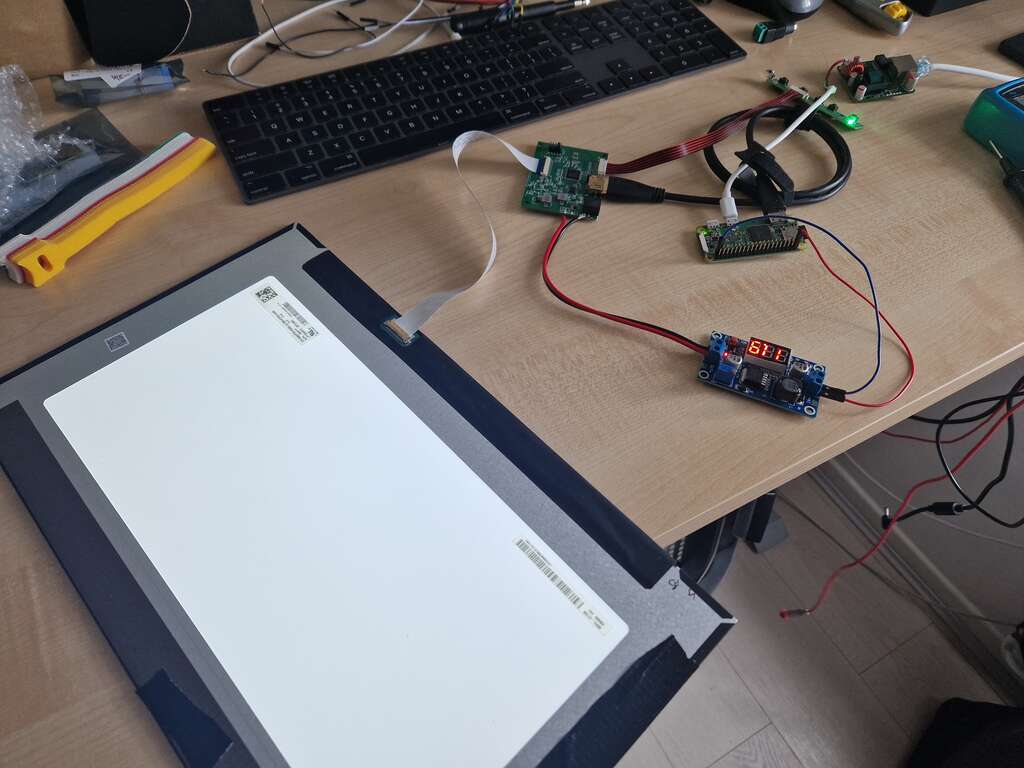
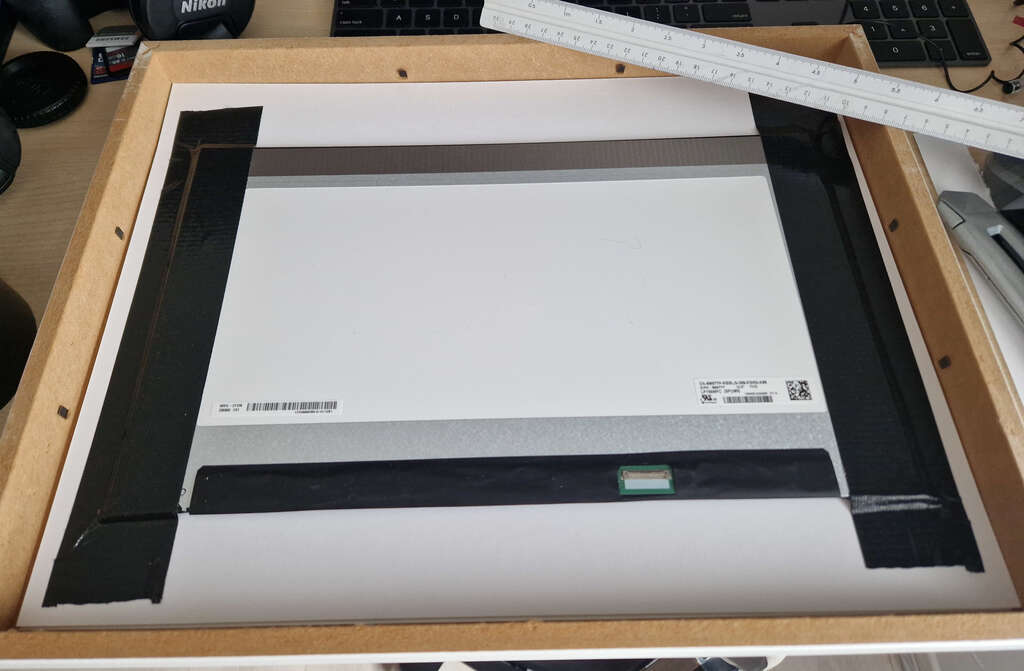
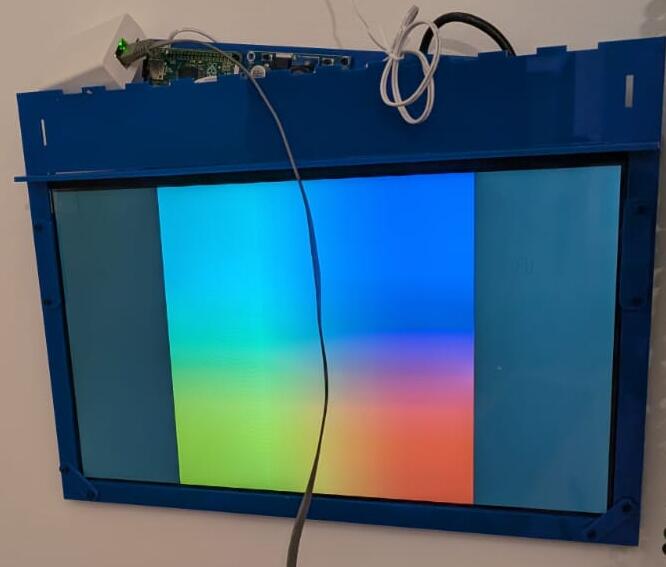
The first step to design my houseboard was searching for a panel. Here is a capture of the moment it failed:

Turns out that scoring a random replacement panel for a laptop and trying to pair that with a random controller board works well in theory but needs a lot of luck. Starting with a cheapish £40 LCD panel with an eDP connector, I got an HDMI-to-eDP board. My panel and my board didn't like each other, so all I got was backlight, and that is not very useful unless you only need to display binary information.
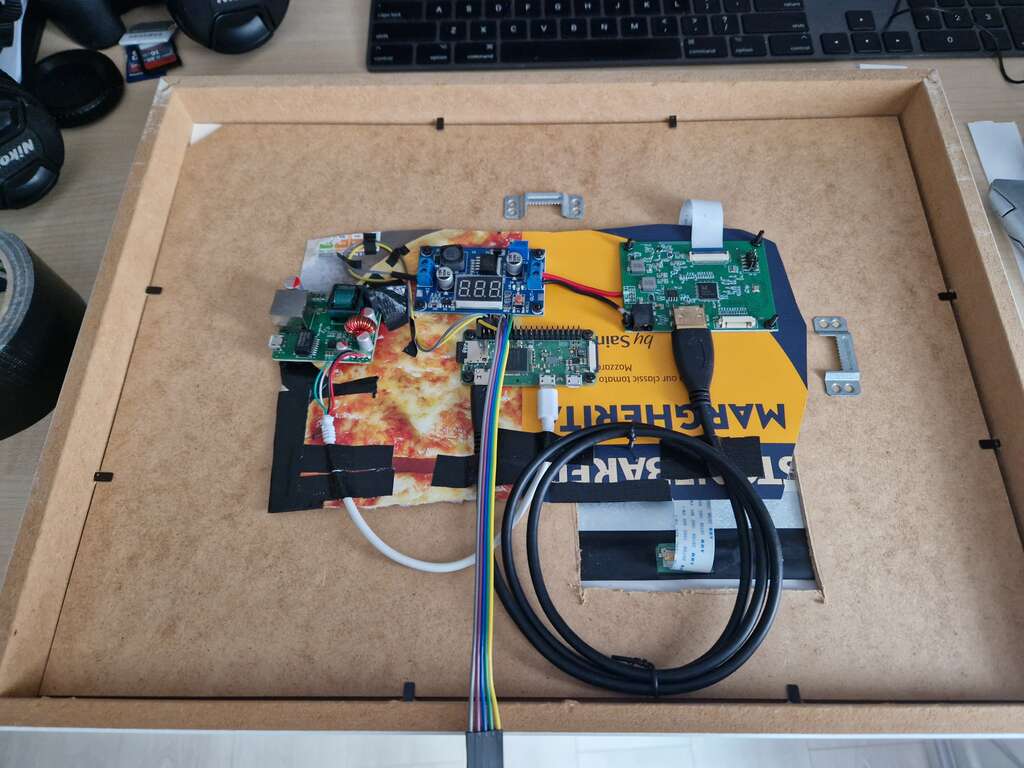
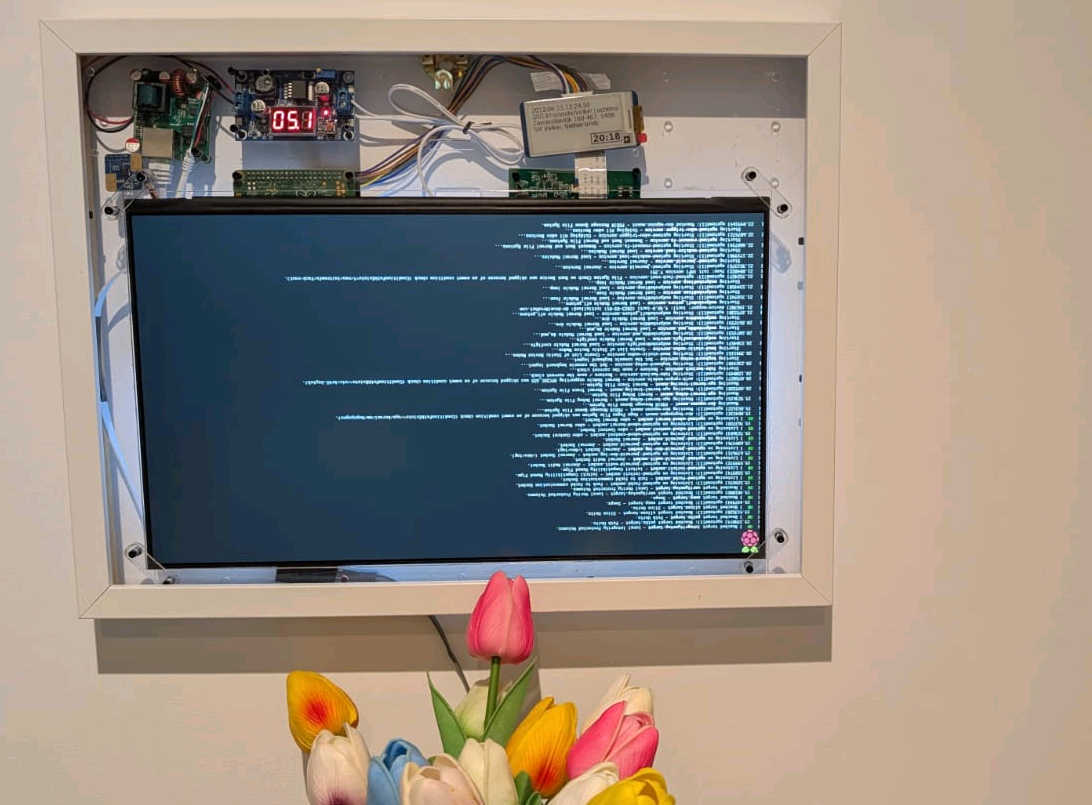
Since ordering and shipping a different panel controller board would take a few weeks, I decided to change my strategy: my P0 would be changed to a Prototype-Prototype-0 (PP0), using a similar platform to let me start working on the software and sensors, while I figured the way to control a panel. Here is Houseboard PP0, in all it's glory:
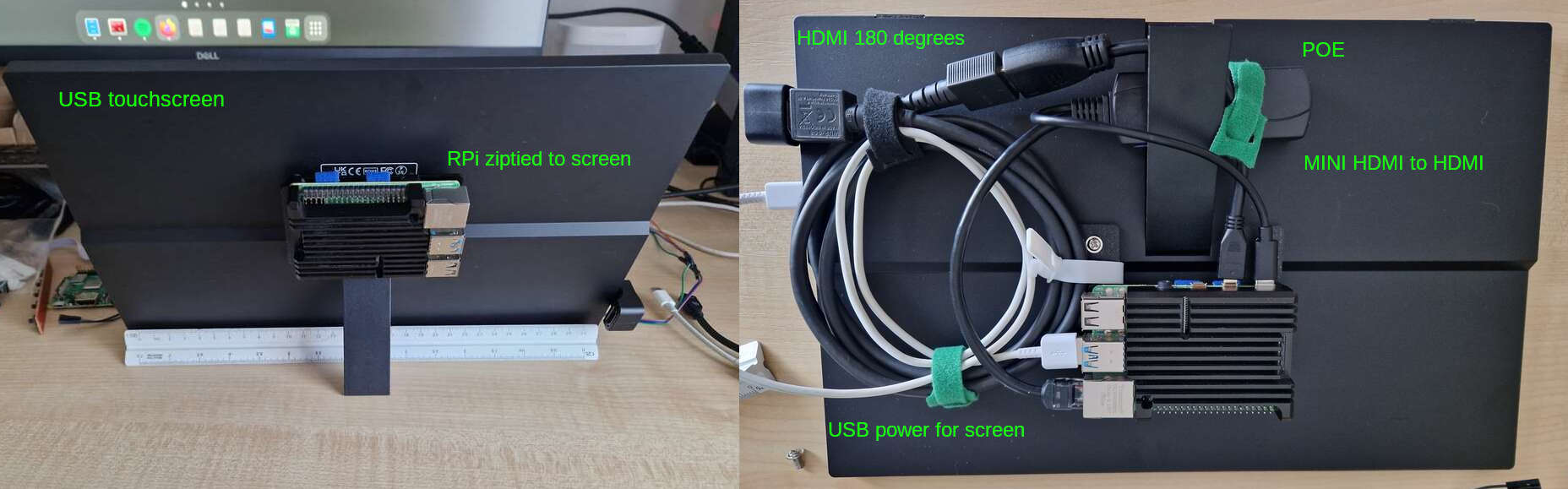
I got a USB-powered touchscreen, which is powered by a RaspberryPi 4. The RPI itself is powered over PoE, and there is an HDMI connection between the Rpi and the screen, and a secondary USB connection to get touch screen support. The PoE adapter is barely capable of powering the screen AND the Rpi: if I turn the brightness of the screen to 100%, the system will reset.
And with a few sensors (a PIR + mmWave):
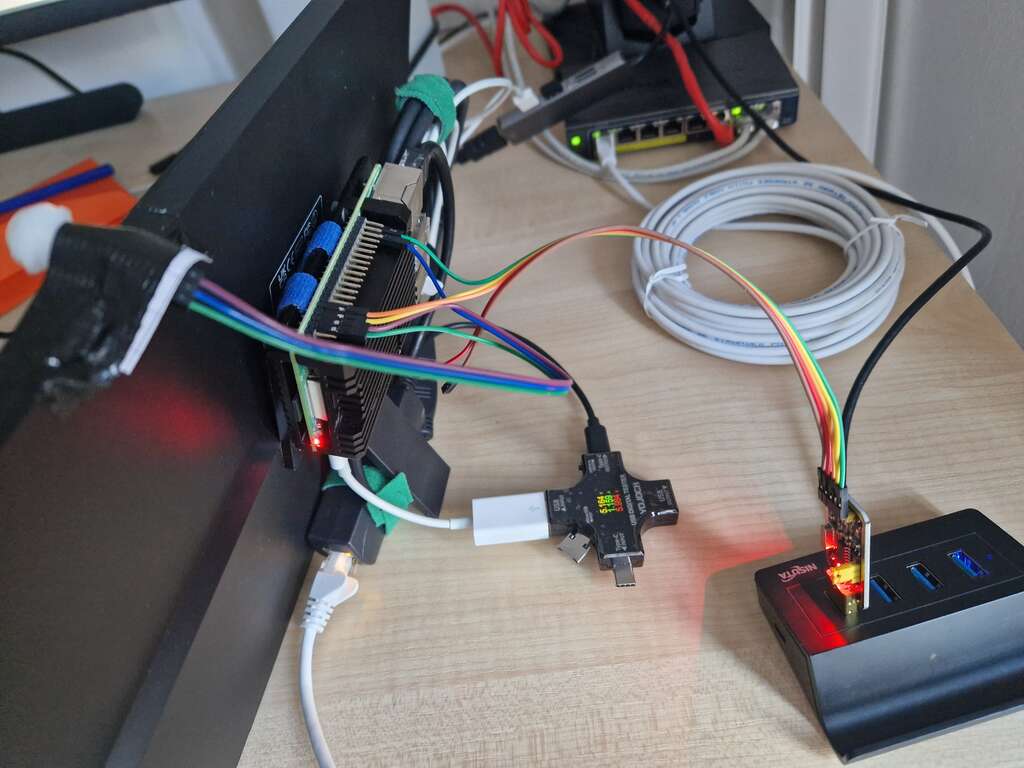
It's not going to win any design prizes, but it works
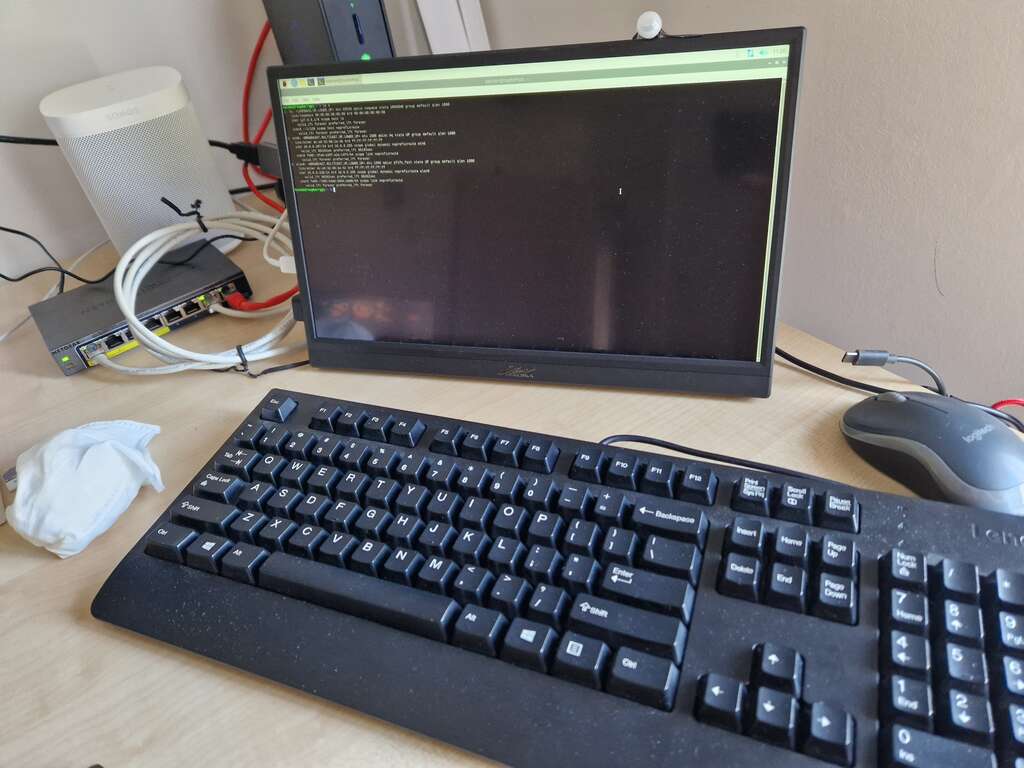
While eventually I did end up solving my LCD panel woes, Houseboard PP0 let me start building some software for the houseboard quickly:
- A Wayland based image display built on top of Swayimage; to show a gallery of pictures when there is no other info to show
- A presence service (to determine when there are humans nearby, based on PIR and mmWave sensors).
BoM for Houseboard PP0
- A RaspberryPi 4 (any Pi will do, but having a bunch of USB ports makes this project a lot simpler)
- A USB powered screen. I went for a 14'' 1080p 1920x1080, and with the PoE constrain that's probably as big as it's feasible. My browsing history says I got this one: https://www.amazon.co.uk/dp/B0CB5FWGT8
- PoE splitter (USBC + ETH out, 5v 4A) - Look for the adapter with largest power rating you can, a cheap one won't work. I went for this one: https://www.amazon.co.uk/dp/B0CHW5K5F4
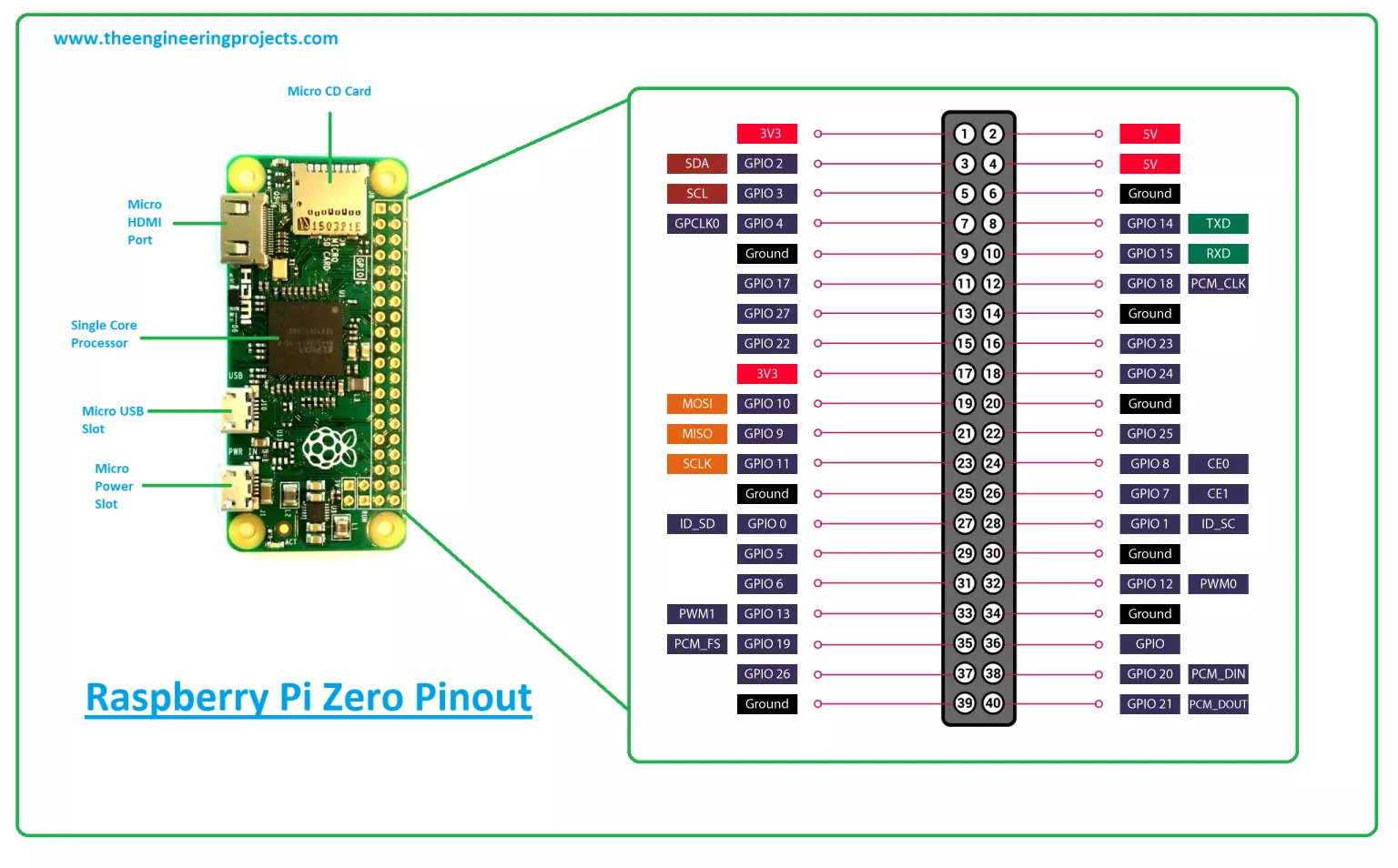
- PIR sensor (NB VCC=5v, connect to Pin4, GND Pin6, OUT Pin17)
- Smaller PIR sensor (VCC=5v Pin4, GND Pin6, OUT Pin17)
Useful references
{kind=link}
Houseboard P0: HDMI to eDP
Published 2024-07-07
Minor victory in my quest to build a houseboard based on a Linux-PoE-netboot-RaspberryPi-etc: I figured out how to run my own LCD panel.
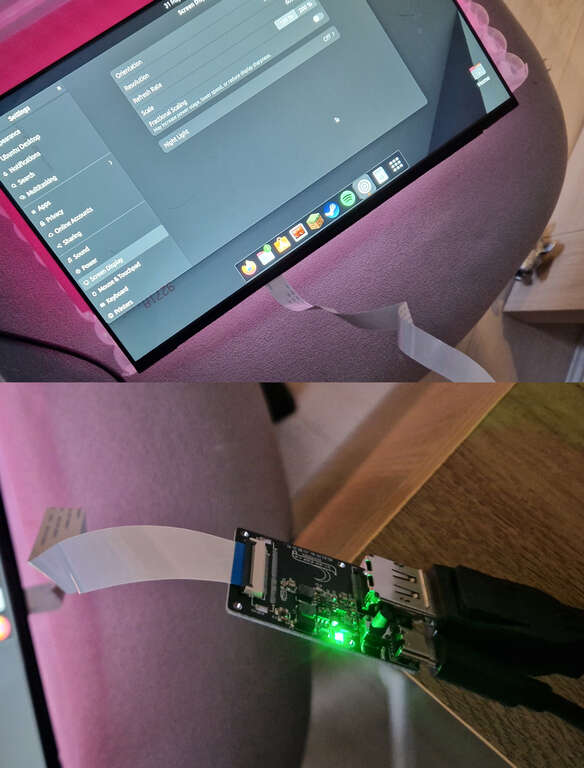
The first step was verifying my panel worked. For this, I used a display port to eDP converter. Turns out eDP is basically DP, but over a ribbon cable. There are some cheap boards, for example, that do this - searching for "DP to eDP" or "display port to eDP" will yield a high number of vendors. The key part is matching the ribbon type of the panel you need to drive (30 or 40 pins).
Unfortunatelly, single-board-computers (like the RaspberryPi) don't have DP, despite DP being better than HDMI in every way. The cost of adding a DP connector seems to be high and mosty in licenses, not necessarily in components, so SBCs don't do it. This meant that getting my expensive GPU to use my cheap panel wasn't good for much beyond knowing the panel works.
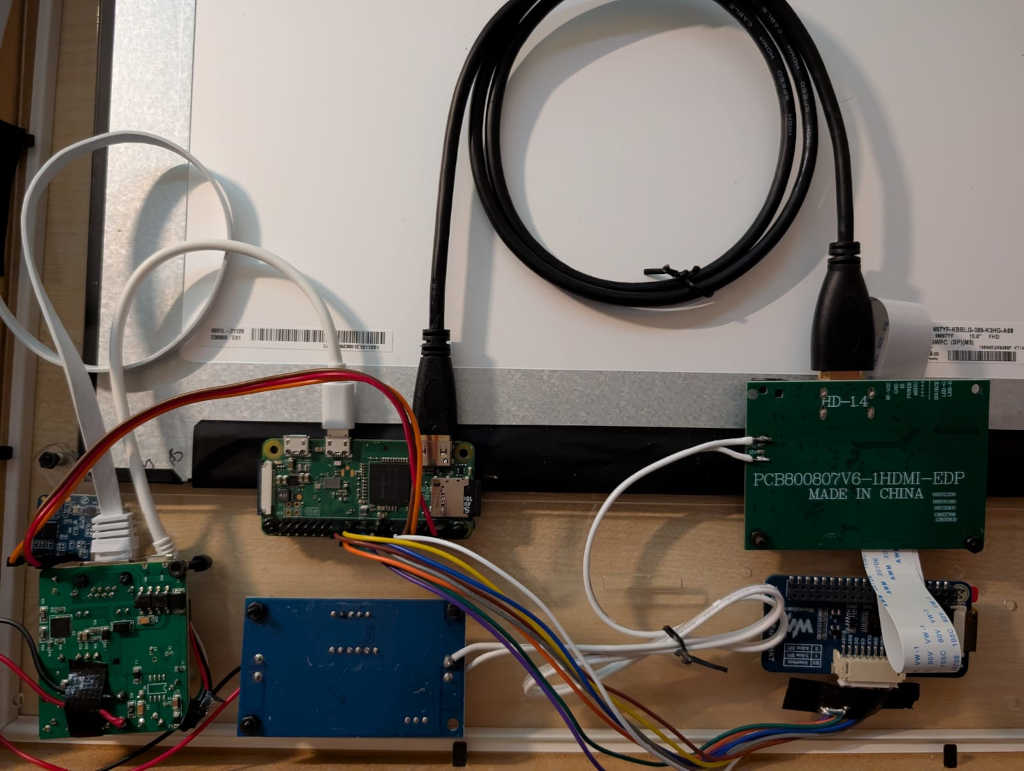
Fortunatelly, I managed to find a board that liked my panel:

I got a "PCB-800807V6-1HDMI-EDP 30PIN LCD driver board", which comes at about £10 and supports multiple resolutions. This was a nice lucky find, and it unblocked the build of HouseboardP0, which I'll document in some other entry.
Homeboard P0: Stonebaked Margherita
Published 2024-07-14
Homeboard P0 has been built!!1
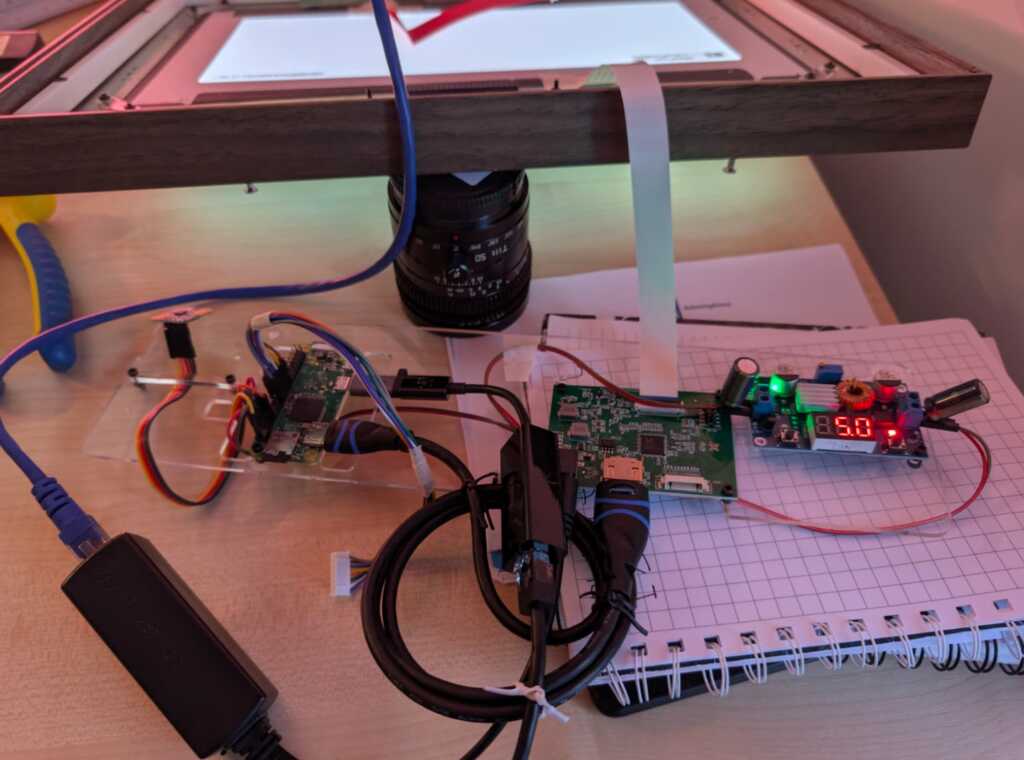
After figuring out how to run my own LCD panel, it was just a question of buying the right cables. I wanted to build a homeboard, and I thought I'd spend a ton of time writing cool software. Turns out 90% of the project is a game of "did I buy the right cable". Eventually I did end up with enough cables to build this monstrosity:
You are admiring a:
- Raspberry Pi zero,
- Powered over ethernet, with a PoE adapter
- The Raspberry Pi Zero powers the LCD controller board
- But the controller board needs 12V, so there is a DC-DC board that bumps the 5V from the RaspberryPi to the 12V the board needs.
(Full list of materials further down, so you don't need to hunt all of these)
Here the glorious moment everything is connected together, and actually boots an OS:
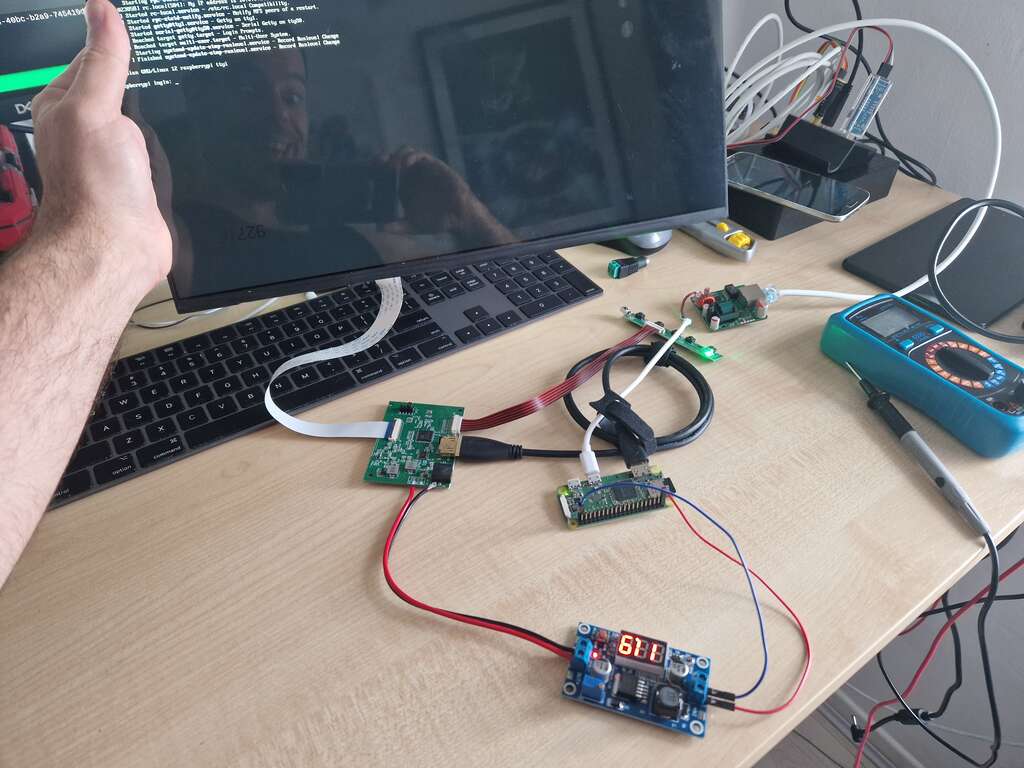
Of course at this point I realized the weak point of my design is on the mechanical linkage between the different boards. To tame this quite literally unwieldy hodgepodge of cables, I ate a pizza:
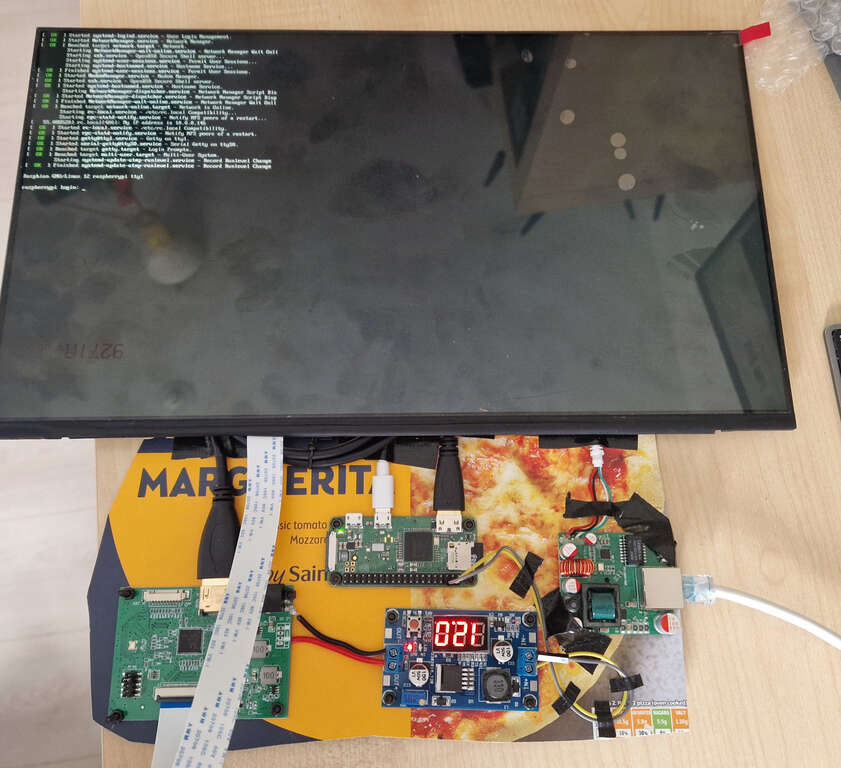
Using the cardboard box of a pizza, some ducktape and a few M2 screws, I built a beautiful hack mount for all my boards, which let me move the assembly around for tests. This was enough for quick power checks, but pizza box cardboard isn't a very durable material. I upgraded to a full frame:
This is an Ikea picture frame, with an LCD screen tapped to the front and a hole in the back for the eDP connector. Everything mounted together:
And the glorious, glorious first boot of the Stonebaked Margherita Homeboard P0:

Of course at this stage the only thing the Houseboard P0 does is boot. An achievement, but not too useful. Next up, I'll make it do something. Possibly crash.
BoM
- Pi Zero (not W, but W works too)
- LCD panel
- HDMI to eDP board
- PoE adapter
- M2 Screws
- Step up board DC-DC 5v to 12V
- M2 Screws
- Jumper wires (get a mix of F/F, M/F and M/M)
- An Ikea Ribba picture frame
- Pizza. Margherita not required.
- Mini HDMI to HDMI
Optionals:
- UART - to figure out why things don't boot, or to debug sensors
- Regulable power source 3 to 30V - useful to debug power to elements in isolation
- HLK-LD2410S 24G mmWave sensor Manual - not used yet, but soon
Useful references
Homeboard P0: Stonebaked Margherita Picture frame
Published 2024-07-18
With my homeboard booting up, it's time to make it show something. Some day I'll build a net-boot capable system, but until then I'd like to have it do something, even if it's by installing a few services by hand.
SD bootstrap
[Feb 25 edit: added this section]
An Rpi Zero won't do much without one, so, starting with a base Raspbian Bookworm for Rpi Zero (32 bit), with no GUI:
- Download an ISO compatible with the board
sudo dd of=/dev/sdX if=./XXXX.img bs=8M status=progress- Mount sd card, then
- Enable ssh:
cd /media/$USER/bootfs && touch ssh && touch ssh.txt - Create user (headless):
echo username:password > /media/$USER/bootfs/userconf.txt
These steps will give you an sd card that should boot and automatically connect to an eth connection (not wifi, of course), and let you ssh into the device to continue the setup. No need to hook up a keyboard.
First boot
Optional: UART is useful to debug the first boot, but if the SD bootstrap was successful everything should just work.
- Debug why the system doesn't boot, as with any new install
- UART into the system, then enable SSH (because the USB ports are hard to reach to connect a keyboard)
- Disconnect UART, reconnect sensors, login over SSH
- apt-get update, upgrade, etc...
Prepare Wayland
Raspbian Bookworm 32bit doesn't have support for Wayland out of the box. To enable:
- Add this magic to /boot/firmware/config.txt
dtoverlay=vc4-kms-v3d
gpu_mem=128
- /boot/firmware/cmdline.txt needs to have
wayland=on sudo apt-get install mesa-utils-bin wayfire seatd- seatd is required to manage sessions, otherwise wayfire will complain it can't open a terminal.sudo usermod -aG tty username- I'm not sure if this is required. Try to skip it and see what happens. Let me know if you do.- reboot
- After booting up, it should be possible to run
wayfirein a terminal; an empty Wayland screen (with a cursor) should show up
Wayfire as a service
With everything "working", we can make Wayfire a system service, so it will start at boot:
Add this to /etc/systemd/system/wayfire.service (change the user name, and you may want to change the runtime dir too):
[Unit]
Description=wayfire
After=multi-user.target
[Service]
Environment=XDG_RUNTIME_DIR=/run/user/1000
ExecStart=wayfire
StandardOutput=inherit
StandardError=inherit
Restart=always
RestartSec=10s
User=batman
[Install]
WantedBy=multi-user.target
Now enable the service
sudo systemctl daemon-reloadsudo systemctl enable wayfire
Use this on your next reboot to find out why things are broken: journalctl --follow --unit wayfire
Note: wayfire seems to crash a few times on startup. I guess there is a service dependency I haven't found yet, but as long as it's set to Restart=Always it should eventually come up.
Screen rotation
Because of the way the flex cable is fed to the HDMI-to-eDP board, the screen may end up rotated 180 degrees. You may also want a portrait picture frame, instead of a landscape one. To rotate Wayland:
- Do
kmsprintorkmsprint -m - Look for the name of the screen, eg HDMI-A-1
- Look for the mode, eg 1920x1080@60.00
- Create this in ~/.config/wayfire.ini, replacing the values found above for your setup
[output:HDMI-A-1]
mode = 1920X1080@60.00
position = 0,0
transform = 90
~~No need to reboot Wayfire, it should pick up the changes and fix itself immediately. I think.~~ You'll need to sudo systemctl restart wayfire to see the changes.
swayimg
With a GUI, it's time to show a picture. I hacked swayimg to load pictures from a local server, plus a few other useful features to make it more usable in a RpiW, like consuming less memory than default, and porting to 32 bits. To install dependencies:
sudo apt-get install libcurl git ninja-build meson
sudo apt-get install libcurl4-openssl-dev
sudo apt-get install libwayland-dev wayland-protocols
sudo apt-get install libjson-c-dev libxkbcommon-dev libfontconfig-dev libjpeg-dev
To build: [Yes, this is building swayimg in our target. This is horrible and will take a long time, so be prepared for a long coffee break. Some day I'll setup a crosscompiler].
git clone https://github.com/nicolasbrailo/swayimg.git
meson setup [build|--wipe build]
ninja -C build
Make sure the meson step finds curl and libjpeg, otherwise it won't be a very useful LAN picture frame.
To start:
- Launch Wayfire in a terminal
- In another terminal:
WAYLAND_DISPLAY="wayland-1" DISPLAY="" /home/batman/swayimg/build/swayimg
Check that nothing crashes too much.
P0 picture frame
Also this to /etc/systemd/system/ambience.service (also change the user name. Or make a new user):
[Unit]
Description=ambience
After=multi-user.target
[Service]
Environment=XDG_RUNTIME_DIR=/run/user/1000 WAYLAND_DISPLAY="wayland-1" DISPLAY=""
ExecStart=/home/batman/swayimg/build/swayimg
StandardOutput=inherit
StandardError=inherit
Restart=always
RestartSec=3s
User=batman
[Install]
WantedBy=multi-user.target
Then:
sudo systemctl daemon-reload- In a terminal:
journalctl --follow --unit wayfire --unit ambience - In another terminal:
sudo systemctl enable ambience
sudo systemctl restart ambience
Next time you boot up, the Stonebaked Margherita P0 frame should behave like a picture frame.
Homeboard: wwwslide
Published 2024-09-10
Homeboard hasn't seen much progress during the holidays, except for a small but useful piece of software: I created a hacky way to serve pictures over a web interface. This is a fairly fundamental piece of infrastructure for my homeboard project; most of the time these will be displaying some ambient information, but most of the screen's real estate will be used to show my (reasonably large and decades spanning) personal picture collection.
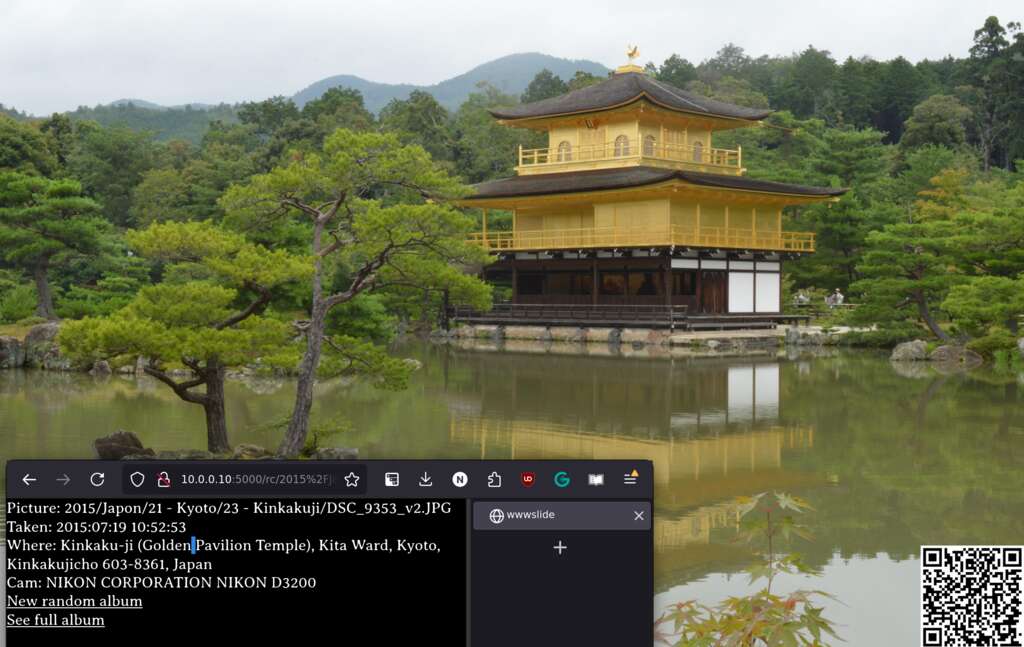
wwwslide looks like this:
From the readme:
wwwslide is a client/server for LAN slideshows. If you have a large picture collection and want a way to display them in multiple places, wwwslide server will create a web interface to retrieve random pictures from a single url. The web client can display these pictures, but there is no reason to use the included client: you could curl wwwslide and pipe it to an image viewer.
wwwslide has a server that can be pointed to a local pictures directory. It expects that pictures will be grouped in albums, sorted by /$year/$arbitrary_name/.jpg (eg 2019/foo/bar/album/.jpg). On startup, it will pick up one album, randomly, and serve a few pictures from this album to anyone calling its /get_image web endpoint. Once it runs out of pictures for this album, it will select a new random album (with a new random subset of pictures).
The included client (which can be accessed on the root of the server) can be used to browser this picture (just point your browser to your wwwslide LAN address). It's not very smart, but it should work!
Remote control: each picture includes a QR code. Scanning the QR will take you to a local page with metadata of the shown image. This page can also be used to control wwwslide (eg to request that this album is displayed from the start, or to select a new album)
Reverse geolocation: the metadata of each picture includes a reverse-geolocation. No need to guess where you took a picture, wwwslide will guess for you (as long as your pictures have geotags in their exif data)
wwwslide v0 was just a Flask service sending local-disk jpg's, and I found I frequently wondered where a particular picture was taken, or wish I had a way to see more pictures from a specific location. I'm quite proud of the idea to implement this: wwwslide will watermark pictures with a qr-code that can be used to get more info on the shown picture, and to display more picture of a specific album.
Crosscompiling to RaspberryPi Zero
Published 2024-10-12
Homeboard continues progressing, albeit at a snail pace. Using a RaspberryPi Zero as the base board means not only the project runs at a leisurely pace, but so do any attempts at compiling software in the target itself. Because I got tired of measuring my build times in minutes, I decided it's time to set up a cross-compiler from my PC to my homeboard. This means I can now build things in my reasonably fast PC, and deploy the resulting binary to the RaspberryPi Zero.
Setting up a cross compiler from scratch can be challenging, as it requires replicating a large chunk of your target. Luckily, the Raspberry Pi is a popular platform and plenty of articles explaining how to set up a x-compiler are available. Unluckily, I found most of them didn't work for me, with my host being Debian Bookworm. In the end I managed to find a combination of arcane spells to make x-compiling work.
First, get a Raspberry Pi Zero image, and mount it locally. This will be the sys-root of the target when x-compiling:
wget https://downloads.raspberrypi.com/raspios_armhf/images/raspios_armhf-2024-07-04/2024-07-04-raspios-bookworm-armhf.img.xz
xz -d 2024-07-04-raspios-bookworm-armhf.img.xz
# Find out the mount-start offset (multiply by 512)
fdisk -lu "$IMG_FNAME" | grep Linux | awk '{print $2}'
mkdir -p mnt
mount -o loop,offset=541065216 2024-07-04-raspios-bookworm-armhf.img.xz ./mnt
And to build things:
clang -target arm-linux-gnueabihf -mcpu=arm1176jzf-s --sysroot ./mnt/ test.c
That's all; this should create a binary in armv6 format, ready to be deployed to your target. A few things I discovered:
- I couldn't make this work with gcc. I don't know why.
- If your
--sysrootisn't correct, things won't work. You won't get an error, but a binary will still be built; it will just be a binary with the wrong format, and you'll only know because it will segfault on start. Good luck trying to figure out if the segfault is yours, or from a problem in the build process.
I wrapped this in a convenient bash script so you can build a makefile that will x-compile easily, have a look here: https://github.com/nicolasbrailo/rpiz-xcompile
Homeboard: Wayland on X
Published 2024-10-28
Besides cross-compiling to RaspberryPi, at times it's also useful to just run things locally. While faster than building on the target, the cycle of xcompile and deploy is still cumbersome for short sessions (i.e. when the target is usually offline, unpowered, and possibly lost somewhere in my house). For these situations, I found out I can run Wayland based apps on top of my X-based desktop, using Weston.
Weston is an implementation of Wayland. If you don't have it already, you can apt-get install weston. If you do this in an X based desktop, you can still run weston in a terminal, inside X.
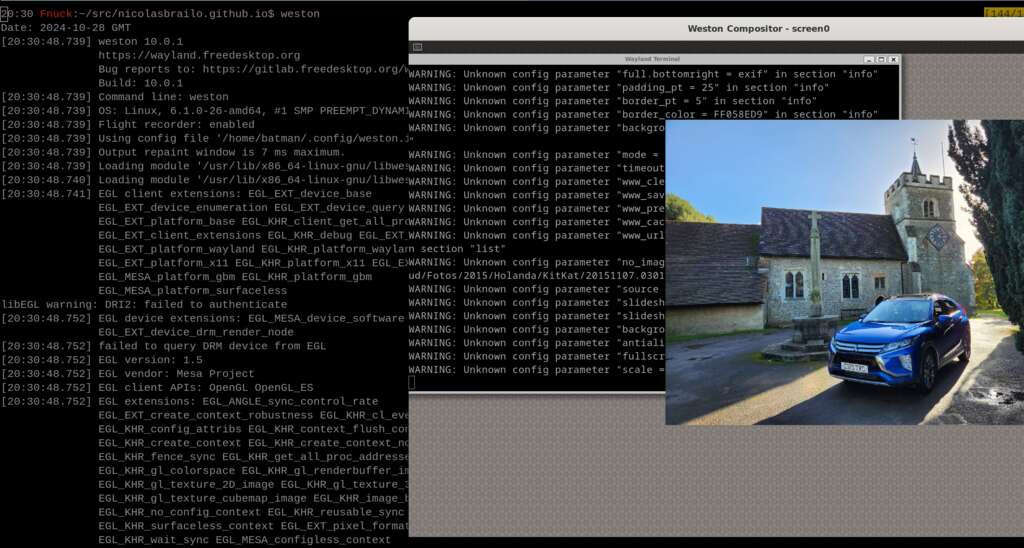
Between Wayland on X and cross-compiling to RaspberryPi, I can test my fork (hack) of Swayimg for RaspberryPi Zero.
Homeboard: Industrial Design (bonus: Inkscape)
Published 2025-02-09
My Homeboard project has officially left its cardboard pizza phase. Almost:
The 2 or 3 pixels above show the first "industrial design" of the homeboard. Or at least the parts that "work". It's hanging from a wall, like a real picture frame. Unfortunately it has bugs, and all its guts are hanging from the top.
I spent some time working on a mount, cut with a laser engraver. The mount has two main pieces: a frame for the display, and a horizontal mount that can be hanged from a hook in the wall. The vertical display frame slots into the horizontal mount, meaning there is no flimsy glue holding expensive equipment: gravity does the job. There are some screws and Ls to give it a nice shape, but the main stress between the hook in the wall and the display is supported by the material strength, not by glue. All the cool electronics fit in a small box on top of the horizontal mount. Or at least that's the idea.
As nice as my design is, it has bugs: You can see in the picture I forgot to consider that wires, especially fat cables such as HDMIs, have physical properties, such as bend radius. Without a slot for wiring, the electronics that fit nicely on the top box in my drawing, actually protrude from the top. The ribbon cable was mirrored in my drawing, meaning a weird 180-degree twist was needed to fit the screen to the main board. The box itself doesn't lock, because the "teeth" are slightly misaligned. And the screw holes for the Raspberry Pi are about a quarter mm out of alignment.
Attached to this post is my SVG design, with theoretical bug-fixes for the problems (version 3, if anyone is counting). I haven't tried printing it yet, and I wouldn't be surprised if V4 is required too.

Image above shows the outline; clicking on it should open the original svg, which is probably mostly blank because vector laser cuts have 0.001mm strokes. Download and open with Inkscape to see it (you may need to change the view mode to outline, too).
Bonus: misc Inkscape tips
My experience with anything that has colors is zero, and I had to spend time learning how Inkscape works to build the design above. Seeing a mechanical design you have in your head come to life with a laser cutter is incredibly rewarding, and I can see myself embarking in more ambitious designs some day, when I have more free time. Here's a list of things I learned and should remember next time I'm using Inkscape:
- It's easy to build complex shapes from basic ones using Path > Union/Difference/etc
- millimeter alignment is hard by hand, but using the position and size input boxes it becomes easy. Start all sub-assemblies in a new drawing, at (0,0), and follow the plans to build the full assembly.
- Actually, alignment by hand is easy (just not precise). It can be a time saver: Build guide-rules, then align by hand, finally adjust the position coordinates for precise fitting. For example, to place a screw hole in the bottom right corner, 3mm from the borders: the hard way is to calculate the position (width of board - 3mm - hole size / 2), same for height. The easy way: create a guide line at
width - 3mmandheight - 3mm. Place hole by hand, zooming in. The coordinates will usually be a few 100s or 10s of micrometers (um!) from the correct value, which you can then set by hand. - Actually, there's an even easier way: An element in inkscape will have 8 arrows around it. By default, the center of coordinates is the center of the object, but clicking on any of these arrows will make the coordinates relative to it. That means you can select the top center arrow of a screw hole, enter
board width - 3to position it horizontally, then select the left center arrow and enterboard height - 3to position it vertically. - When I write
board width - 3I actually mean you can writeNNN - XXXin the position boxes of Inkscape. They perform basic math operations. This is a huge time saver. - Most boards are regular, and have screw holes in symmetric positions vertically and horizontally. When this is the case, you can place all 4 screw holes by mirroring the first one: place the top left screw hole, then select it together with a box the size of the board. Mirror the board vertically, and place a new hole in the position of the first. Select both holes, mirror horizontally, etc. Voila, 4 screw holes with only one measurement!
Homeboard V1, bootstrap V2
Published 2025-02-16
With ~most~ some of the bugs fixed in the industrial design, it's time to setup a second Homeboard. That way I can experiment on one, while the other shows pretty pictures. Because my computer is also a new install, it's now a good opportunity to document the full bootstrap process from an almost brand new and clean Ubuntu 24.04.
Bootstrap a new devenv
- Get normal dev tools
sudo apt-get install build-essential git llvm vim - The linker needs to learn how to build arm binaries:
sudo apt-get install crossbuild-essential-armel crossbuild-essential-armhf - Clone the sw project:
git clone git@github.com:nicolasbrailo/homeboard.git - Don't forget to
git submodule update --init --recursive - Type
make xcompile-startin the root of gpio_mon. It will, on its first run, setup the cross-compile environment. - The x-compile env will be "hardcoded" to some rpi image, for example
2024-11-19-raspios-bookworm-armhf.img.xz. You probably want to update~/src/homeboard/pi_gpio_mon/rpiz-xcompile/mount_rpy_root.shto make it point to a newer image, ideally the same one you will use to bootstrap the sd card. - Once
make xcompile-startfinishes, you can check it succeeded;~/src/xcomp-rpiz-env/mntshould contain a copy of the rpi environment (the x-compile root)
Bootstrap the OS
This article has been updated to work, but the gist of it is:
- Find the ISO you used for the x-compile env, then
sudo dd of=/dev/sdX if=./XXXX.img bs=8M status=progress - Mount the SD card and enable ssh:
cd /media/$USER/bootfs && touch ssh && touch ssh.txt - Create user (headless):
echo username:password > /media/$USER/bootfs/userconf.txt - [Wayland] Add this magic to /boot/firmware/config.txt
dtoverlay=vc4-kms-v3d
gpu_mem=128
- [More Wayland] /boot/firmware/cmdline.txt needs to have
wayland=on - Boot up with the SD card, then ssh into the device and do
sudo apt-get install mesa-utils-bin wayfire seatd - Add Wayfire as a service
Build things
- Update the TARGET_IP in the makefile, then
make setup-sshto enable passwordless ssh - Start with the
gpio_monproject, it's the simplest.cd ~/src/homeboard/pi_gpio_mon. If youmake, it will either fail or create a binary in the wrong format if you haven't set up the cross-compile environment (see "bootstrap new devenv"). - After
makesucceeds,file gpiomonshould show something likeELF 32-bit LSB pie executable, ARM, EABI5 version 1 (SYSV), dynamically linked. This means your system can now build binaries for your target platform. scp gpiomon $target-> try out if your xcompile env works as expected
Build harder things
- Move on to
wl_display_toggle(it's the smallest project that exercises the entire stack: cross compiler and Wayfire). - There are more system deps you'll need to install;
make install_system_depsshould take care of most of them. - There are deps for the x-compile env too;
make install_sysroot_depsshould take care of most of them. Some deps may move around, and you may need to find newer versions. - Now
cd wl_display_togglethenmakeandscp wl_display_toggle $TARGET - ssh into the target, and try to shut off the display:
XDG_RUNTIME_DIR=/home/batman/run WAYLAND_DISPLAY="wayland-1" DISPLAY="" ./wl_display_toggle off
Install services
The homeboard doesn't do much nowadays, only show images; once you reached this point, and if things build and run, your build environment and target are ready to use. Just a few more arcane spells and we're done:
- Clean up binaries deployed ad-hoc, like gpio_mon and wl_display_toggle
make deploytgt- In the target, try out hackimg
- Run
XDG_RUNTIME_DIR=/home/batman/run WAYLAND_DISPLAY="wayland-1" DISPLAY="" /usr/lib/arm-linux-gnueabihf/ld-linux-armhf.so.3 /home/batman/homeboard/bin/hackimg /home/batman/homeboard/cfg/hackimg.cfg - You'll need to create the cache dir manually, because hackimg is lazy and won't do it for you
- Run
- Once you checked hackimg runs,
vi ~/homeboard/cfg/pipresencemon.cfg- Set the sensor pin to the GPIO acting as presence sensor
- Adapt the sensitivity to sensor type (mmwave vs PIR)
- It's recommendable to use the mock gpio for a test run
- Try out the ambience service
- In the target,
cd ~/homeboard/scripts && ./install_svc.sh- this will install the ambience service and launch it. Wayfire should already be a service by now, so no install is included. - Use
~/homeboard/scripts/logs.shto see what's broken.
The target should be ready for production, in only about 30 simple steps!
Appendix: it hangs!

Homeboard: eInk display
Published 2025-02-23
What's better than one display? Two displays, of course.
When I see a picture in my Homeboard, I often remember when and where I took it (photos are, after all, a form of exomemory), but not always. In wwwslide, my home slideshow service, I workaround this with a QR code: a small QR code is displayed in a corner of the image, and I can scan it to read the metadata of the picture being displayed. This is a good solution, but I'm not entirely happy with it.
Today, I added an eInk display to my Homeboard project. I can show picture metadata (and maybe even a QR code!) without taking up valuable picture real-estate. I chose an eInk display because they are easy to source and work with, relatively cheap, and require very little power (Homeboard is powered by PoE). Some day, I'm hoping to use it as an extra low-power mechanism to show actual homeboard info (a clock? weather? price of memecoins? The options are endless!)
I couldn't get all of the manufacturer's examples to work (especially the partial refresh), but it works well enough to display a thing rendered with Cairo. The original manufacturer's examples had a custom rendering library which was quite unnecessary; my version of lib-eInk gets rid of all the custom rendering code, and uses Cairo to create graphics. Here's an example:
struct EInkDisplay display = eink_init();
cairo_t cr = eink_get_cairo(display);
// Get display's surface
cairo_surface_t *surface = cairo_get_target(cr);
const size_t width = cairo_image_surface_get_width(surface);
const size_t height = cairo_image_surface_get_height(surface);
// Configure "pen"
cairo_set_source_rgba(cr, 0, 0, 0, 1);
cairo_select_font_face(cr, "Sans", CAIRO_FONT_SLANT_NORMAL, CAIRO_FONT_WEIGHT_BOLD);
cairo_set_font_size(cr, 20);
// Calculate text position
cairo_text_extents_t extents;
cairo_text_extents(cr, "Hola mundo", &extents);
double x = (width - extents.width) / 2 - extents.x_bearing;
double y = (height - extents.height) / 2 - extents.y_bearing;
// Draw
cairo_move_to(cr, x, y);
cairo_show_text(cr, text);
eink_render(display);
eink_delete(display);
Sidenote: my multiline code rendering seems to be eating pointers for breakfast, so struct S* may be rendered as struct S. I should fix this.
Homeboard: eInk display
Published 2025-03-15
Homeboard gained a new form factor: slightly less crappy frame.
I now keep two Homeboards, one in my office -mostly for hacking- and one to display pictures. The one in my office didn't have a good space for the eInk display (spoiler alert: it still doesn't) making it awkward to see both the "real" display and the eink one. To fix this, I built a new mount based on a picture frame. This time all of the elements are mounted directly on the front frame (spoiler alert: this was a huge mistake), and I used transparent perspex material to cut it, so that all elements are visible (I do like this bit, the boards that make up Homeboard are quite pretty).
Mechanics
The build uses an Ikea picture frame, but replaces the front plate with my laser-cut front.
- The Ikea frame is great for this, it's built to support a front plate of 3-6mm, fitting a perspex sheet ferpectly.
- I'm happy with the display corner clips, too. You can see in the picture they hold the display, but are not too obtrusive (only partly due to the clips being transparent). Additionally, they are great to clip on small boards with no mount holes, like the radar sensor (top left in the picture).
- The ribbon connection to the display is hell. The position is awkward, and I can't fit it with a short (2cm) cable. I used a long one (15cm) but it looks untidy.
- Don't overtighten display screws! It's easy to put too much pressure and damage either the two perspex sheets, or the sandwiched display in the middle. I found for a 3mm perspex sheet with a laptop display, 10mm m2 screws loosely tightened (?) work best.
- If you use my mechanical drawings, be careful: between ID V1 and this one, there was bitrot in my svg, and the screws in the pi don't align anymore. Also, the display hole isi about 2mm too big for my panel, and I don't know why (my last cut it was 2mm to small!)
The back of the frame:
Some things I need to improve:
- Ribbon, long or short, placing is super hard. For V2 of this ID, I need to think of a better placement
- In fact, mounting everything to the front panel was a big mistake. It means that mounting things is awkward, because I need to work with a big panel. Any wiring mistake means I need to unmount the board, fix, test, remount. It's much much MUCH easier if I mount all the boards to a single main perspex board, then mount that to the main frame.
- Having a main board with alternative mount position should make it easier to make mounting the ribbon cable less terrible. I need to move the edp board 20mm to the right in this ID, but it's much easier if I don't need to carefully align this before I cut it.
- The corner clips are awesome! I can even use to hold sensors without a screw hole. Here I mounted the mmwave sensor (with no mount screw holes) using one of the corner clips.
- This doesn't work for the eInk display, unfortunately. I still need to figure out how to mount the eInk display without using tape.
Homeboard: A Hardware bug!
Published 2025-03-16
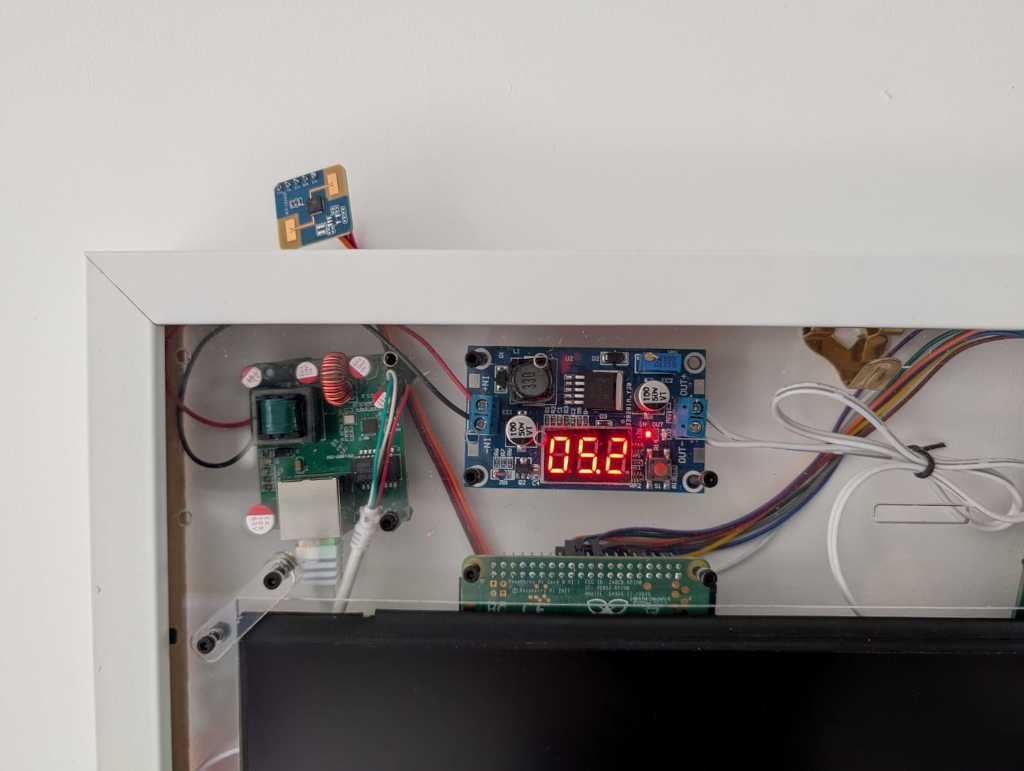
I found my first hardware bug! Can you spot it? It's the big red circle:

The mmwave sensor was mounted too close to either the screen, or the power source (something I thought was a brilliant idea yesterday). Turns out that mounting it so close has an affect on this sensor: when the display is on, it blocks the sensor (and reads it as no-presence). When the display is off, for some reason the sensor picks it up as someone being present. This is bad, because on presence I turn the display on, and on vacancy off. I guess my living room put on a light show for my cats last night.
I suspect I could fix this in the firmware of the sensor, but that's pointless because I can't reverse engineer the sensor protocol anyway. What's the next best fix?
I moved the sensor out of the way, while I think of a better placement.
Homeboard v2
Published 2026-04-23
This week I decided to revive my oldest homeboard, one that suffered a bit of unplanned refactoring after a rapid encounter with the floor (about a year ago, now. Turns out I don't quite have enough time for all of my side projects, or I have too many side projects for my free time). Of course, it wasn't really a repair as much as a complete re-do, salvaging a few pieces here and there.
Side note: xkcd 3233 feels very autobiographical, and on topic for my homeboard series.
Electrical changes
While the brains (a Raspberry Pi Zero), the display and the panel controller haven't changed, I found that this homeboard was rather unstable under load (when decoding and rendering a jpeg to screen). This would cause a brownout and the display to shut off for a second, which was quite jarring for a device meant to show pictures. Worse, sometimes this would happen on startup, making it enter a display restart loop (surprisingly, the RPI survived the brownouts).
The brownouts were probably caused by aging components in the boost converter that switched the 5v from the PoE output to 12v for the display controller, eating any margin for power consumption peaks. I changed this to use a 12V PoE output to feed the display, and then a 5V step down for the Pi. I don't know if it's just newer components or a simpler setup (step down is easier than boosting up), but the build was a lot more stable. The Pi is now fed through GPIO, which is limited in current compared to USB. That's probably a good thing, considering my PoE is limited to 12W anyway.
Though going from PoE->Pi->Display to PoE->Display->Pi made my system more stable, there were still transient drops in voltage and, rarely, brownouts causing the display to go off. I don't have any fancy measurement equipment, but I know the system is running at the power limit of my PoE adapter (around 12W), so I added a couple of 1000uF capacitors to handle the transients. 1000 was just a guess based on power usage and assuming a 10ms transient, which seemed reasonable to a layman in this area. This took care of any stability issues, and the system has been rock steady since.
"Industrial design" changes
The new 12v PoE is smaller than my old 5v PoE, so I was able to reuse the old slot that housed it to put the mmWave sensor. This had been a source of hardware bugs before, and the new position lets me keep the sensor isolated from any electrical interference. I'm especially happy about this, as it means that while building this I learnt at least one thing.
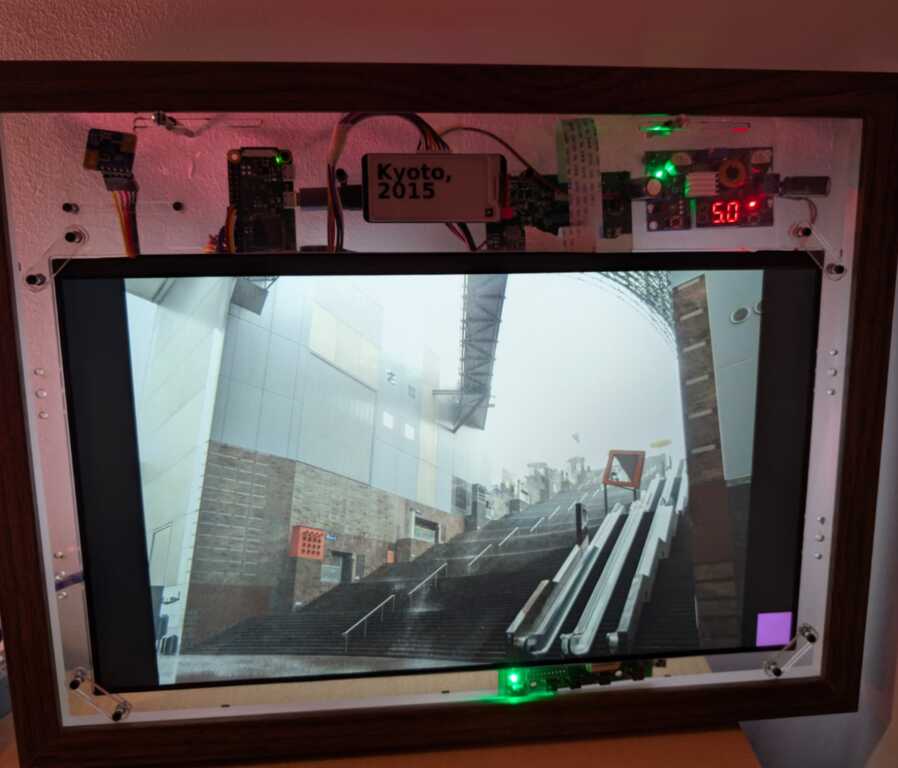
The new version also incorporates a clip holder for the eink at the front, so now it's not floating around. It sticks to the (transparent) front pane and acts as a metadata display (here, year + city for the photo being displayed). I found the font needs to be quite large to be useful, which indicates that the screen is too small (about 3'') or that I am too old (both?).
Finally: sooo much tape. For this iteration, I tried to tape down anything that moved, to minimize cables breaking free and escaping. It helps, none of the fragile connection points move, but the end result is as if a mummy had assembled my homeboard. I bet if you are an industrial designer reading this note, you're crying right now. Ragemail welcome (ideally with suggestions to improve the design, too).
Not fixed in this version: there still isn't a good way to hang the frame. It hangs precariously from the wooden edge, without a notch to keep it in place. I was hoping the mount for the boards would double as a wall mount, too, but it's not sturdy enough to hold the weight.
Software changes
Software changes have been massive, but of course less visible than hardware changes. While I still need to update the repo, the new Homeboard doesn't use Wayland anymore. The system now uses DRM, with no compositor on top. This makes startup much faster - quite unnecessary for an appliance that restarts maybe once a year, but the architecture "feels" nicer. It also got split from one monolithic app into a set of services that interface over D-Bus. Perfect for LLMs to dig around and change the project. The software layer now is
- the main "ambience" service (showing pictures, announcements, driving the eink display, etc),
- an occupancy service, that announces if anyone is around to see the pictures,
- a DRM service, that owns the display management,
- a picture service, that provides photos to the ambience service (by grabbing them from wwwslide),
- a D-Bus to MQTT bridge, enabling reporting and remote control of the device.
The new Homeboard software has working eink integration, so I can see picture metadata at a glance, and I finally implemented a UART interface to the mmWave sensor, with quite a lot of AI help to reverse engineer the protocol. I can now calibrate the sensor, which gives much better occupancy results. Moving the sensor to a D-Bus service also means I can replace it with a newer model, whenever I want to (quite likely never).
Finally, the Homeboard is now integrated with my custom home automation service, ZMW. This gives me a few new features, such as using the mmWave sensor in the homeboard as a presence sensor for home automation, controlling the slideshow from a Zigbee button, and using the display to announce things or show useful information, such as the price of cat food in today's spot market.
End result
One final complication: after (re)building this new homeboard, I ended with 90% of the parts I need to build a 3rd Homeboard. Should I?
Homeboard: Complete
Published 2026-05-09
This is an extremely rare occurrence: I have finished a project!
I have now completed my Homeboard project. This doesn't mean there are no bugs (although tactical systemd unit restarts take care of most known bugs), and it doesn't mean I won't ever build new features (some day I'll make it boot over LAN). It does mean I achieved all of the initial objectives I had for this project (or have, at least, clever workarounds for missing features). It is now complete and stable enough that I don't feel too ashamed of calling it done. Of course, the project is also built in an extensible way so that I can add new (software!) features cheaply.
Looking back:
- The project took 2 years to complete
- The feature I'm sad about not achieving: buttons! Having a physical interface to interact with the device is nice, but the cables in my assembly proved too fiddly to work reliably. I did add a QR code to the display to quickly open the web remote control, however, so I can live without it.
- The feature I'm most proud of: SVG overlays. This was a pretty brilliant idea, if I may say so myself. Running on a Raspberry Pi Zero over PoE, the device is very compute-constrained. This means no fancy HTML or React rendering. Using SVG, I can still overlay arbitrary data and easily extend it, while keeping the device software lightweight enough the platform.
- The best bug: a bad mmWave sensor placement. It picked up occupancy signals from the display, meaning the panel would be in an on/off loop.
You can build your own, extensive instructions are available in the project's repo.